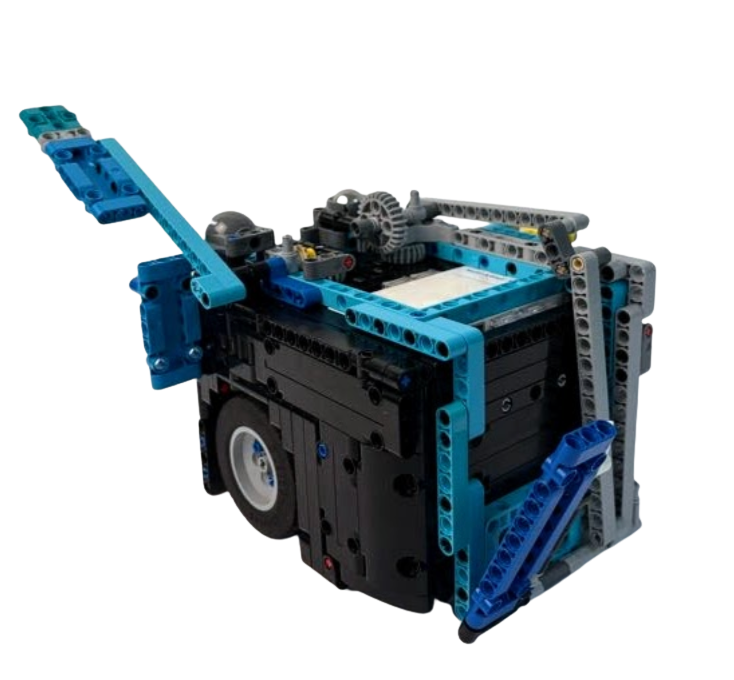
We started building our base robot on October 20, 2025. Based on our previous experience, we chose a rectangular design, which makes it easier to attach different frames and align the robot against walls for accurate positioning.
The robot uses:
This setup provides a good balance between power and battery efficiency. We also chose front-wheel drive, as it improved turning accuracy compared to our previous design.